Optitrack
Book a timeslot
To work with the optitrack setup in Robohouse, please book a timeslot!
Manual
Steps to take:
- Start up the computer with motive and login with password:
optiiscool - Connect an ethernet cable between a laptop that has ROS, and the optitrack wifi router.
- Start up motive on the optitrack pc
- You should be able to see markers on the Motive screen. If there are many false positives, the markers are flickering or double markers are detected when there is only one, you should probably calibrate the Optitrack system before using it, by following these steps.
- Next, create your rigid bodies: select all points from a rigid body, then right click and select Create Rigid Body from Selected Points. Make sure the rigid body count is set to the number that you will use for subscribing. For more elaborate information read: Rigid body tracking
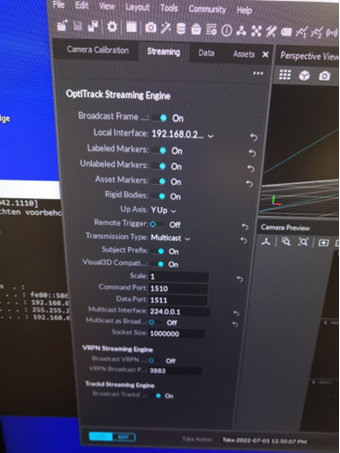
- Make sure the Motive View-> Data Streaming Pane has settings like below:
- Install the mocap package (on your ROS laptop) with:
apt install ros-distro-mocap-optitrack
roscd mocap-optitrack
cd config
sudo gedit mocap.launch
- Change /mocap_node/optitrack_config/data_port: from 9000 to 1511
- Use roslaunch mocap_optitrack mocap.launch
- You can check if it is working by:
rostopic list
rostopic echo /mocap_node/Robot_1/pose
#(where 1 is the rigid body count)
- For collecting velocity data as well, you can clone this repository in a catkin workspace:
- bebop2_toolbox
- Change the remap topic in the launch file (position_velocity_orientation_estimator_multiple.launch) from /Bebop1/pose to the topic that you are publishing with the mocap node, so probably /mocap_node/Robot_1/pose
- For running the node, use:
roslaunch bebop2_state_estimator position_velocity_orientation_estimator_multiple.launch- For checking the data, use:
rostopic echo /Bebop1/position_velocity_orientation_estimation